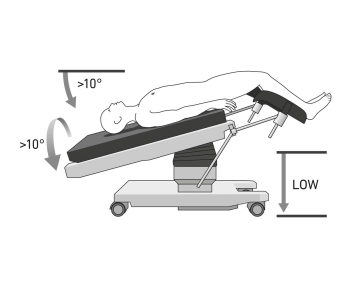
- Gelagert wird in Steinschnittlagerung idealerweise auf einem großen Vakuumkissen (auf der rechten Seite stützt das Kissen den Rippenbogen und den Beckenkamm, damit das Gewicht des Patienten in Rechtsseitenlagerung nicht auf den Arm drückt.
- Es ist die Anlagerung beider Arme zu empfehlen (cave: Wattewickelung bei Anlagerung durch Tuchschlinge)
- Auch erfolgt die Wattewickelung der Knie und der proximalen Unterschenkel, um Druckschäden zu vermeiden.
- Zur Lagerung der Beine empfehlen sich sog. "swan-fins" bzw. gepolsterten „Boots“, damit die Beine bei Bedarf separat und steril abgedeckt bewegt werden können. Alternativ kann die Lagerung der Beine in Beinschalen mit Fixierung der Beine in diesen erfolgen.
- Die Beine sollten im Verlauf über die OP-Tisch-Steuerung ab- und anwinkelbar sein.
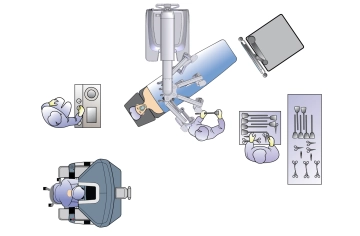
Bemerkung: Der Lagerung kommt wegen des Andockens des Patienten an den Manipulator des Roboters eine besondere Bedeutung zu. Zu beachten ist auch die Verletzungsgefahr der Bauchdecke beim Abrutschen des Patienten. Durch gekoppelte Tische beim Xi System ist eine intraoperative Lageveränderung ohne Abkoppeln möglich. Bei fehlender „Tabel-Motion“-Technik ist vor jeder Lageänderung stehts der Op-Roboter abzudocken und vom OP-Tisch zu entfernen.
Vorsicht: Vakuumkissen können Undichtigkeiten haben. Vor dem sterilen Abdecken sollten diese daher nochmals überprüft werden.